
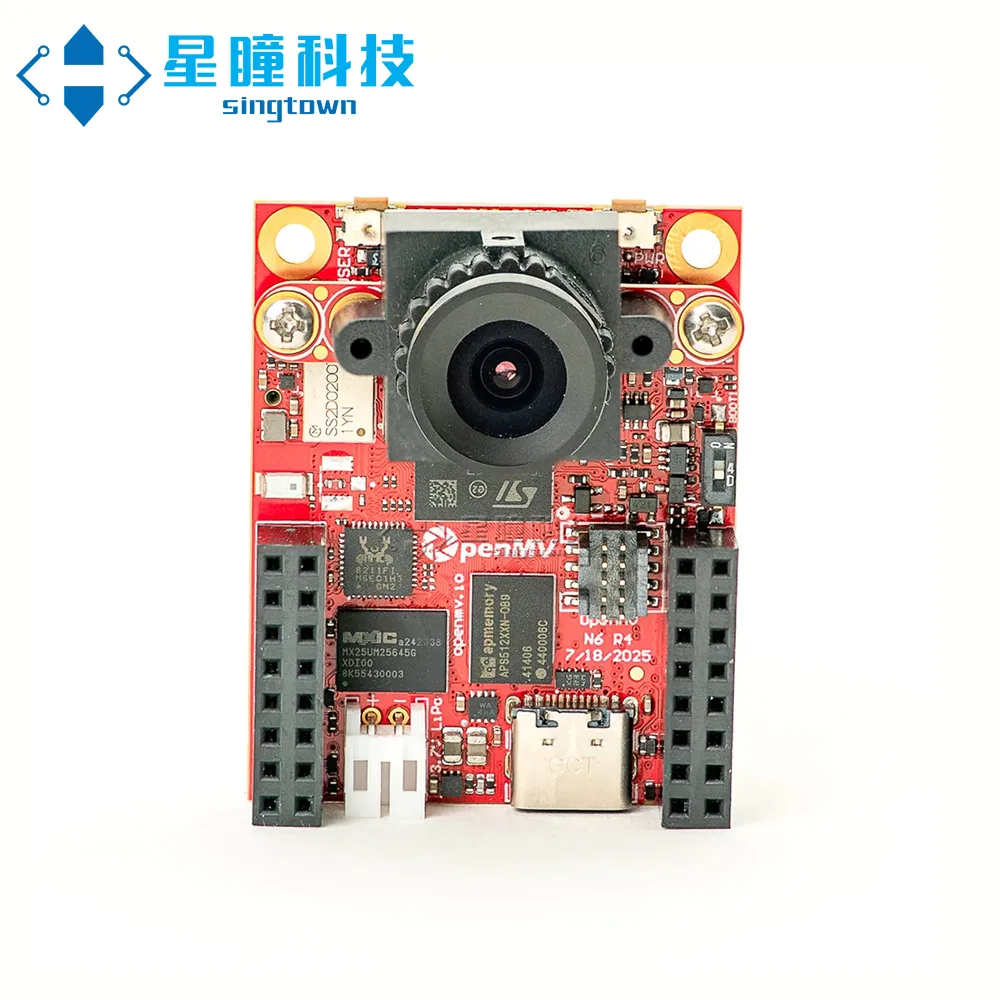
Cámara inteligente con IA OpenMV N6
产品信息
COL$918000
产品描述
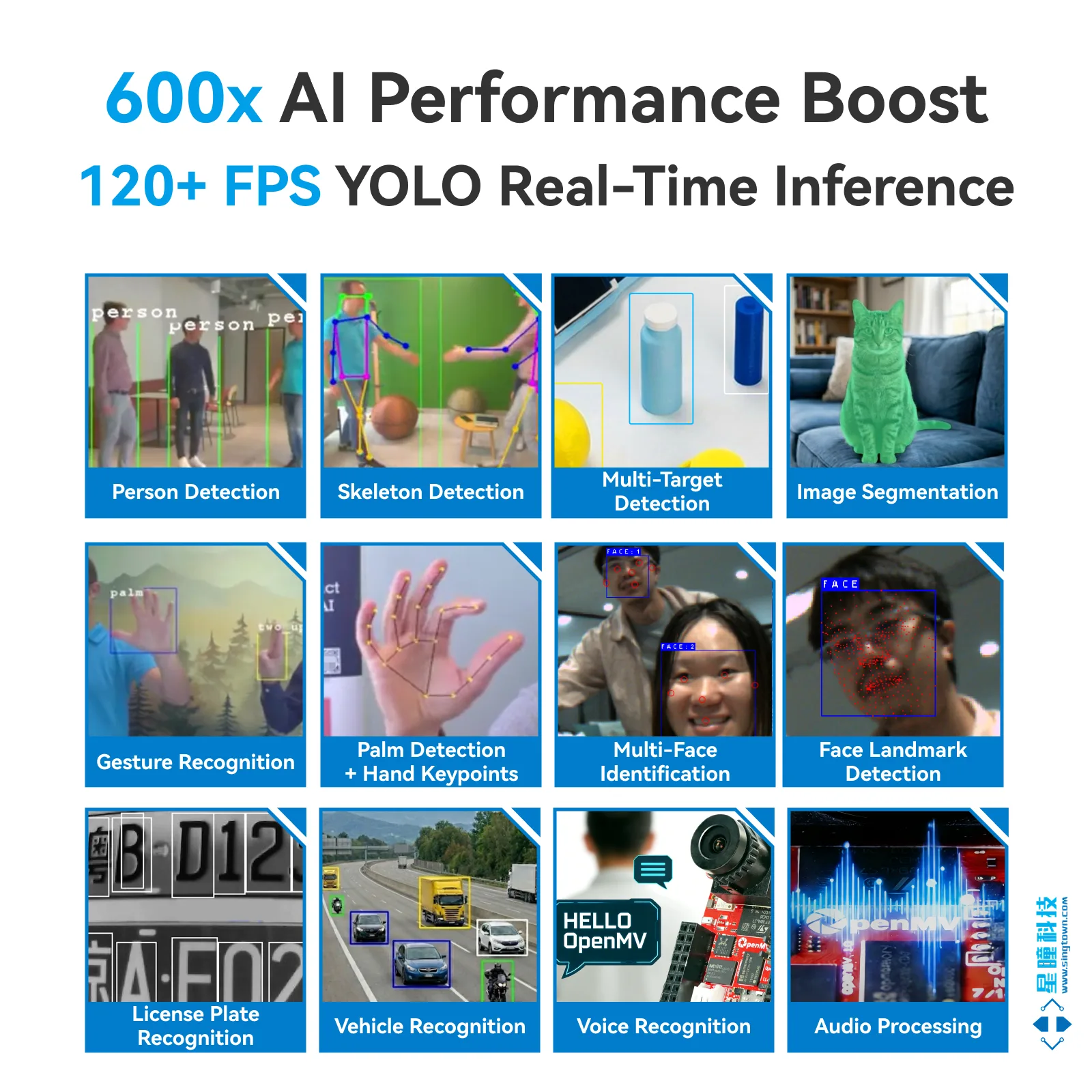
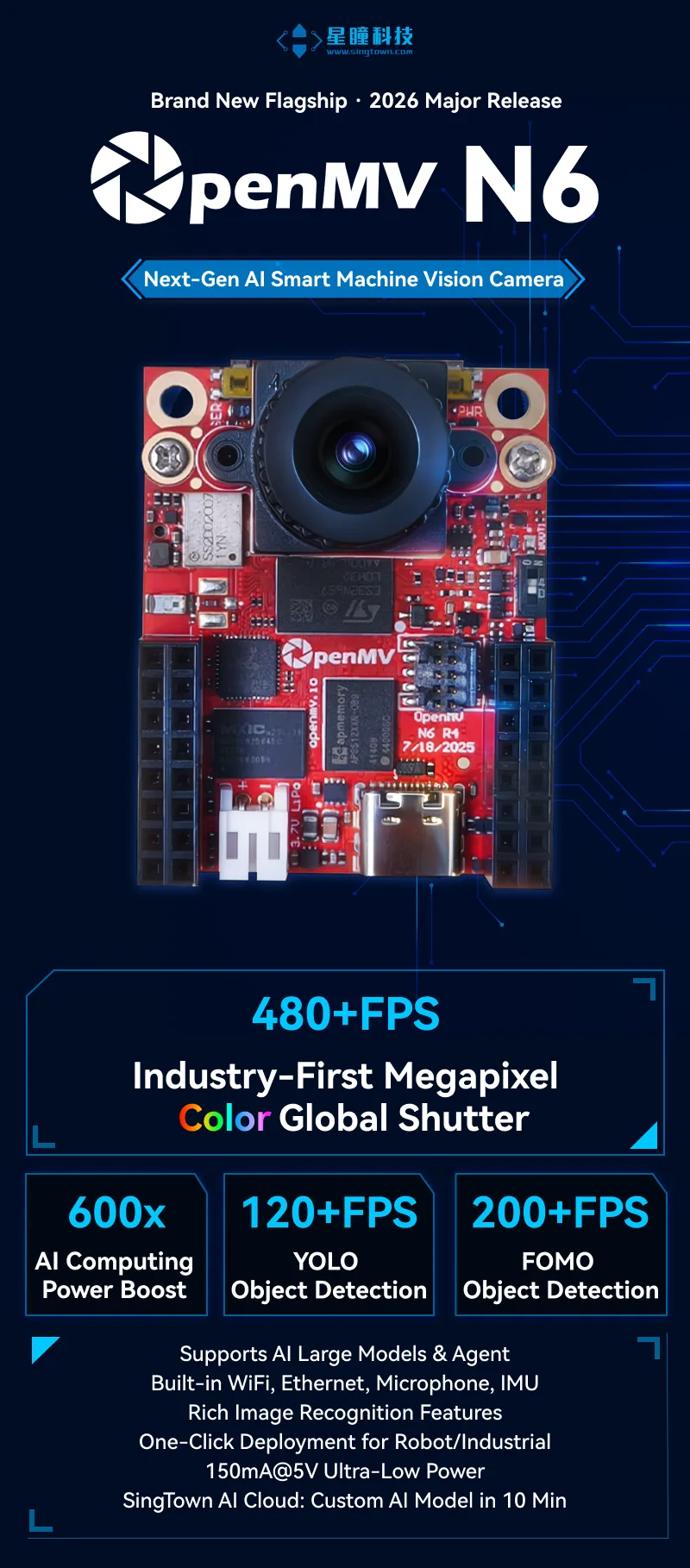
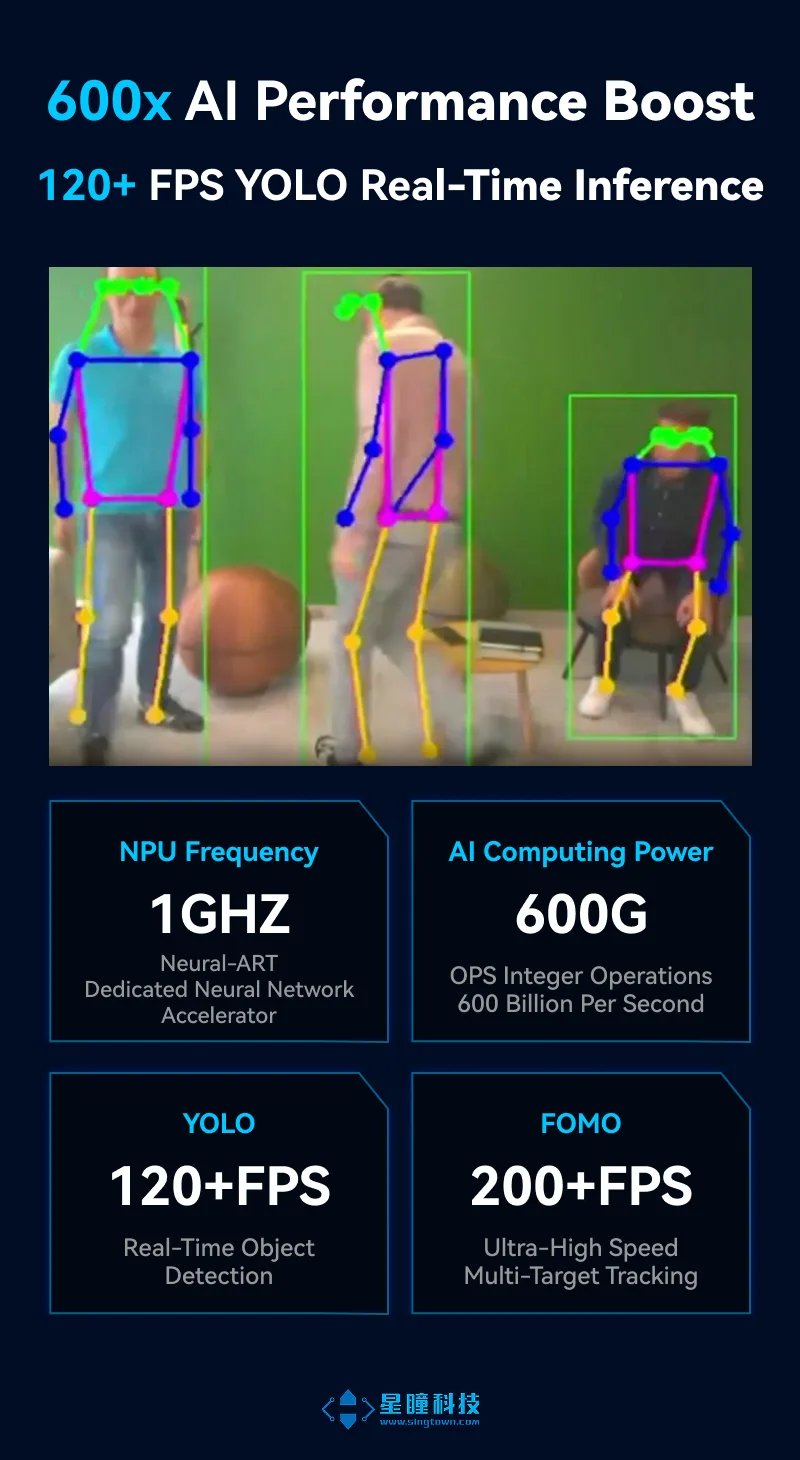
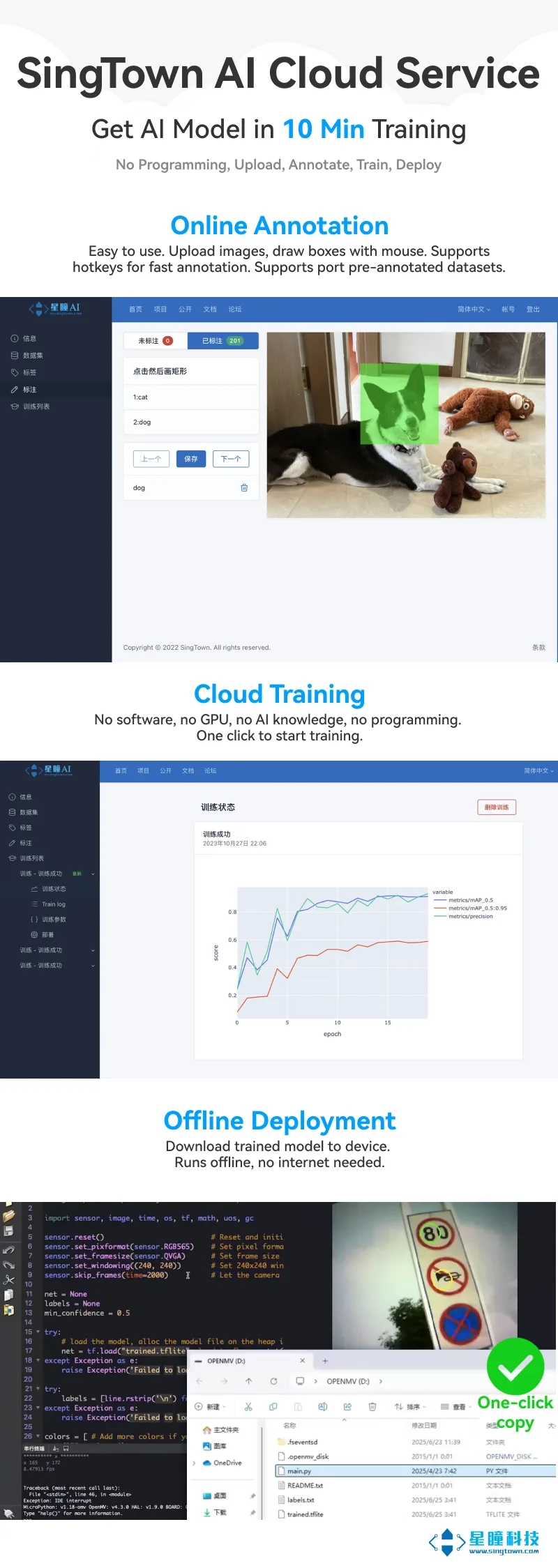
600x AI computing power boost, 480+ FPS color global shutter, 120+ FPS YOLO object detection, 200+ FPS FOMO object detection!
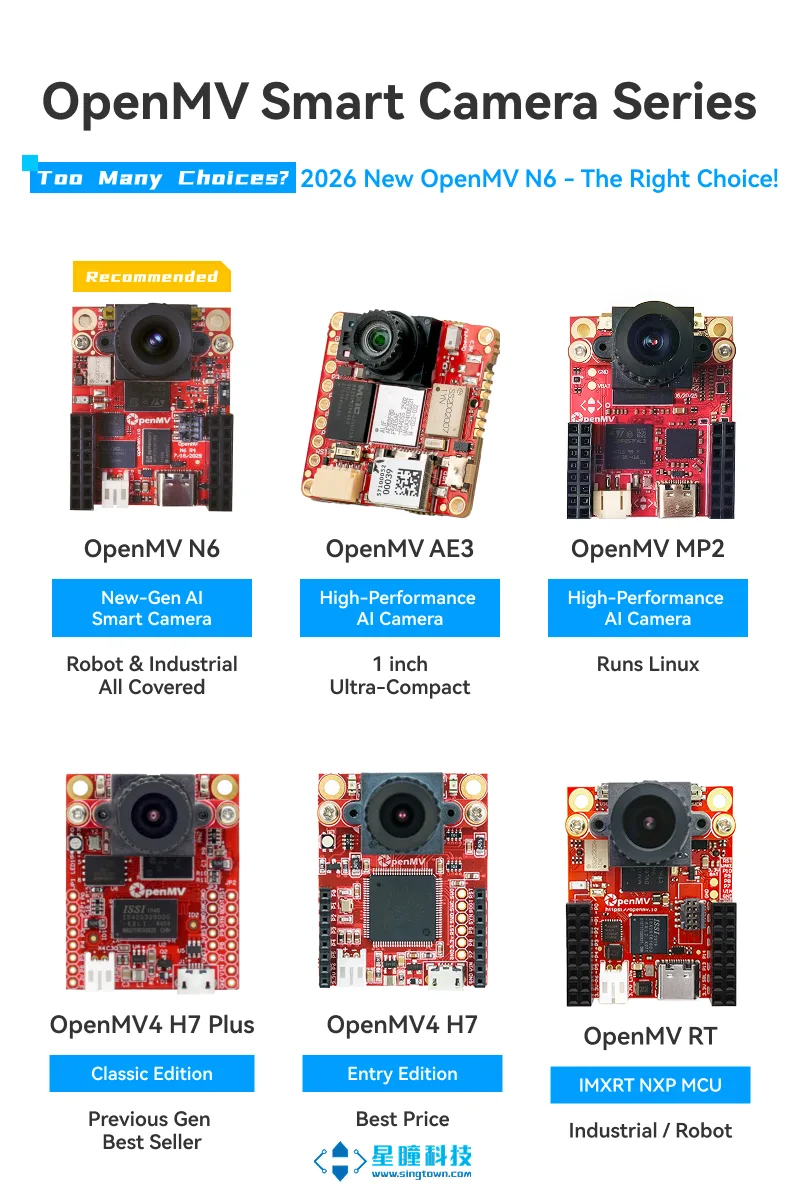
The 2026 latest model OpenMV N6 high-performance AI intelligent image recognition camera is now officially on sale!
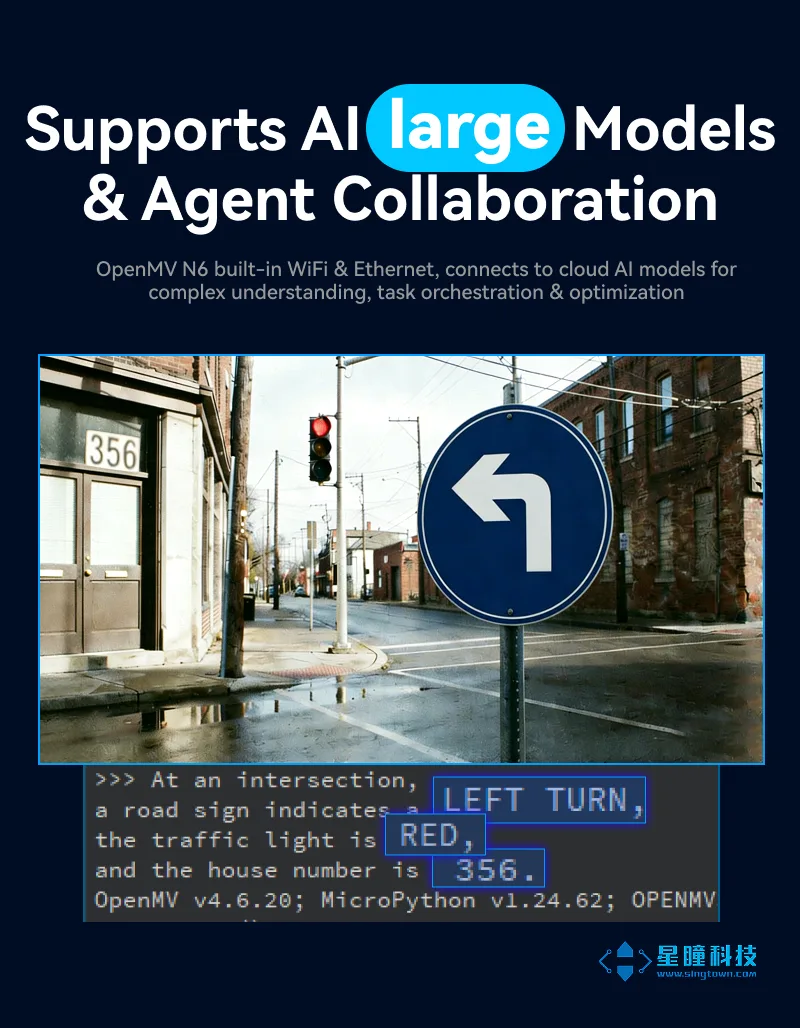
- Supports AI large models and Agent collaboration;
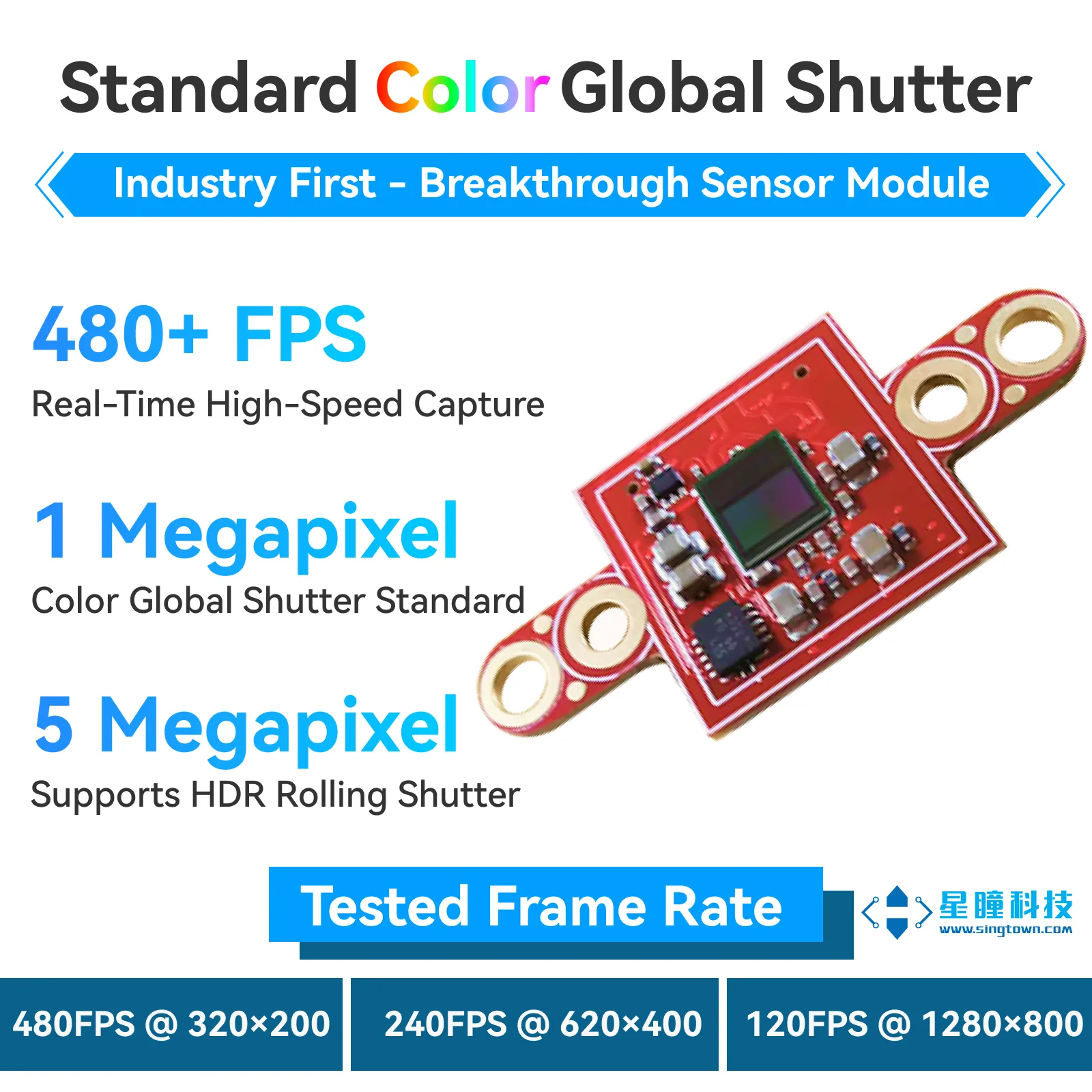
- Standard with 480 FPS megapixel color global shutter – captures and recognizes ultra-high-speed moving objects;
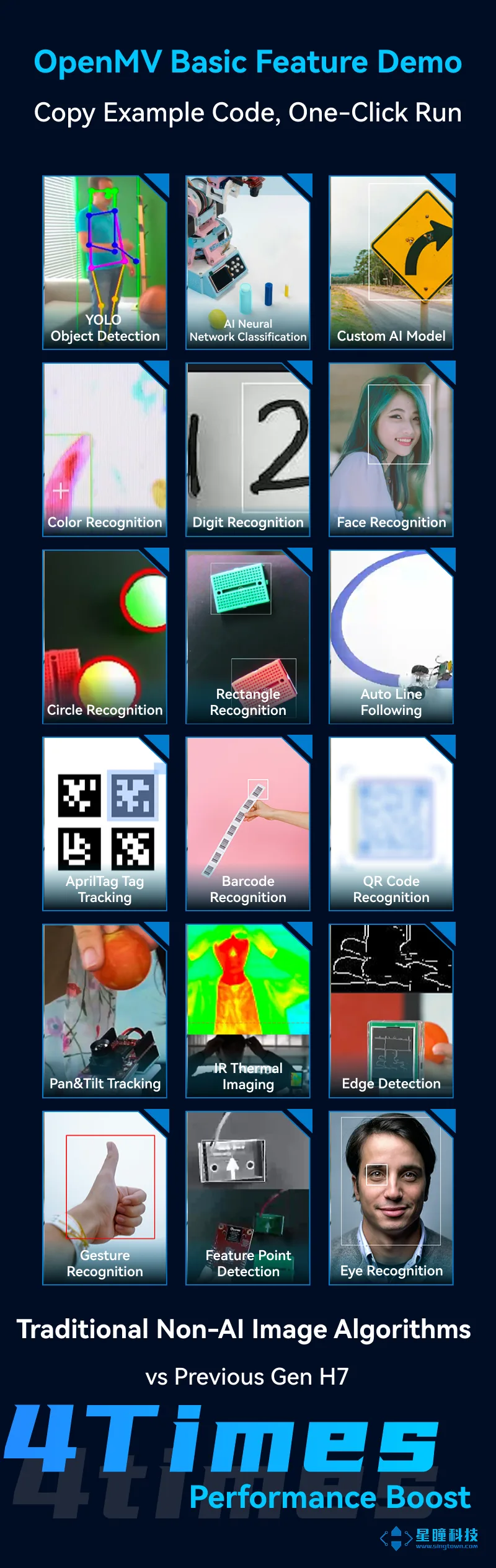
- 120+ FPS YOLO object detection for high-speed execution of complex AI algorithms, with voice recognition support;
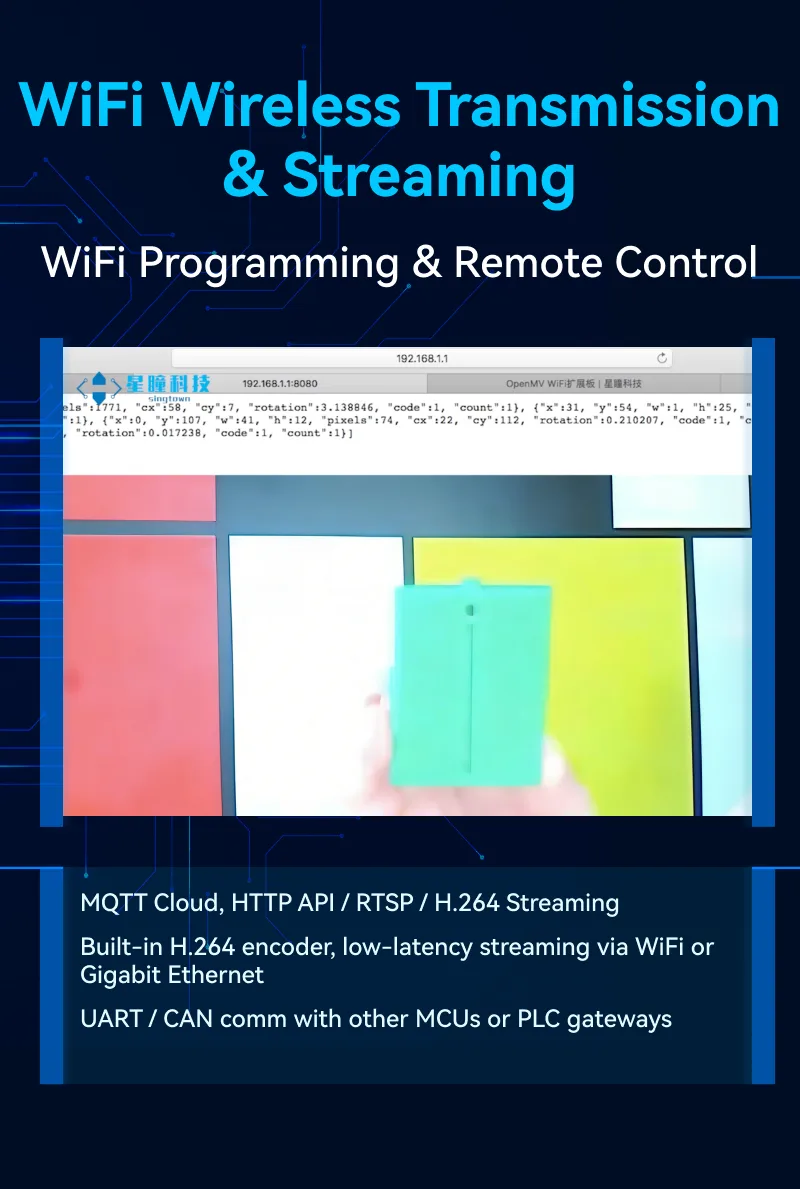
- Built-in WiFi, Bluetooth 5.1, Ethernet, microphone, and IMU;
- Built-in H.264 and JPEG hardware encoding acceleration, supports MP4 recording and network streaming;
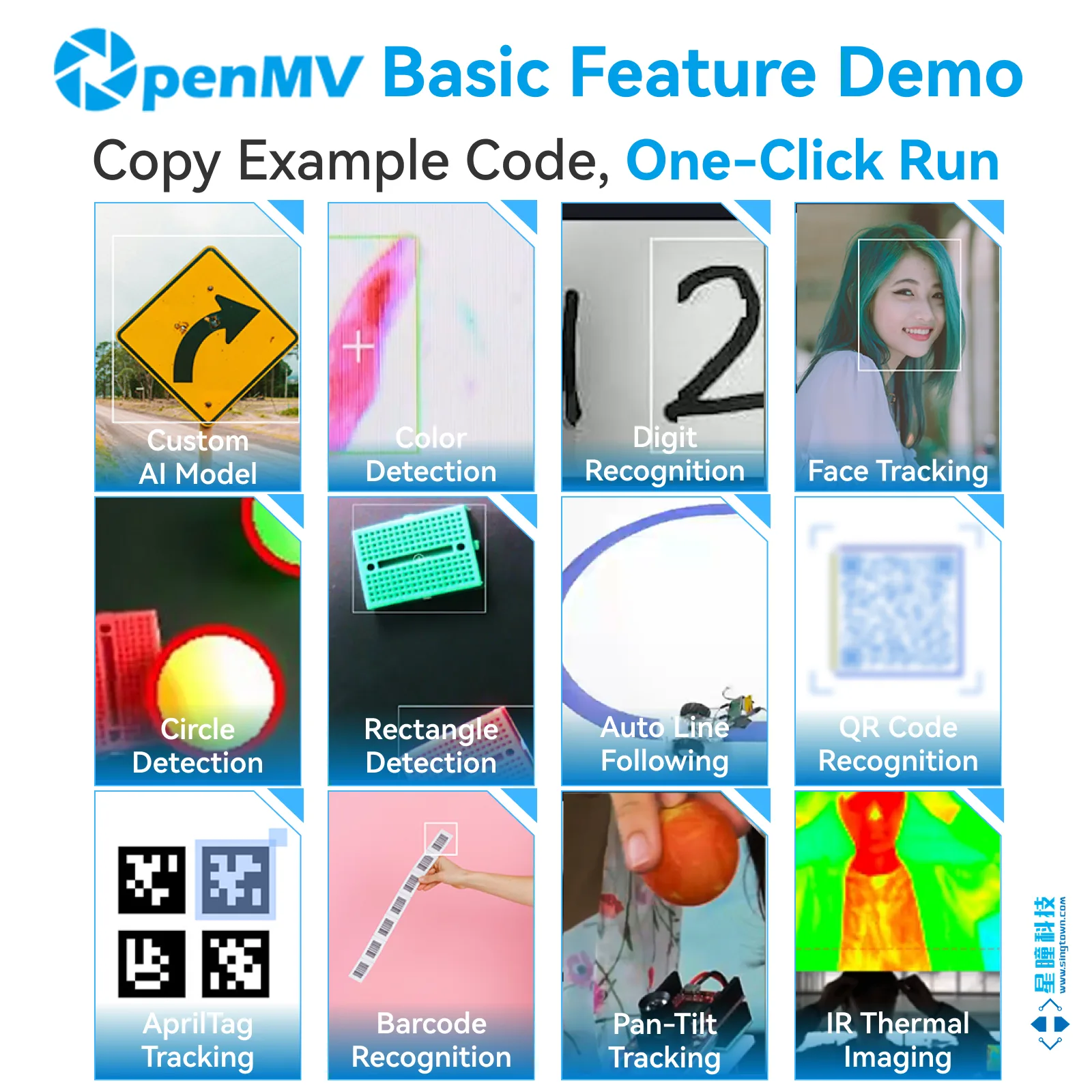
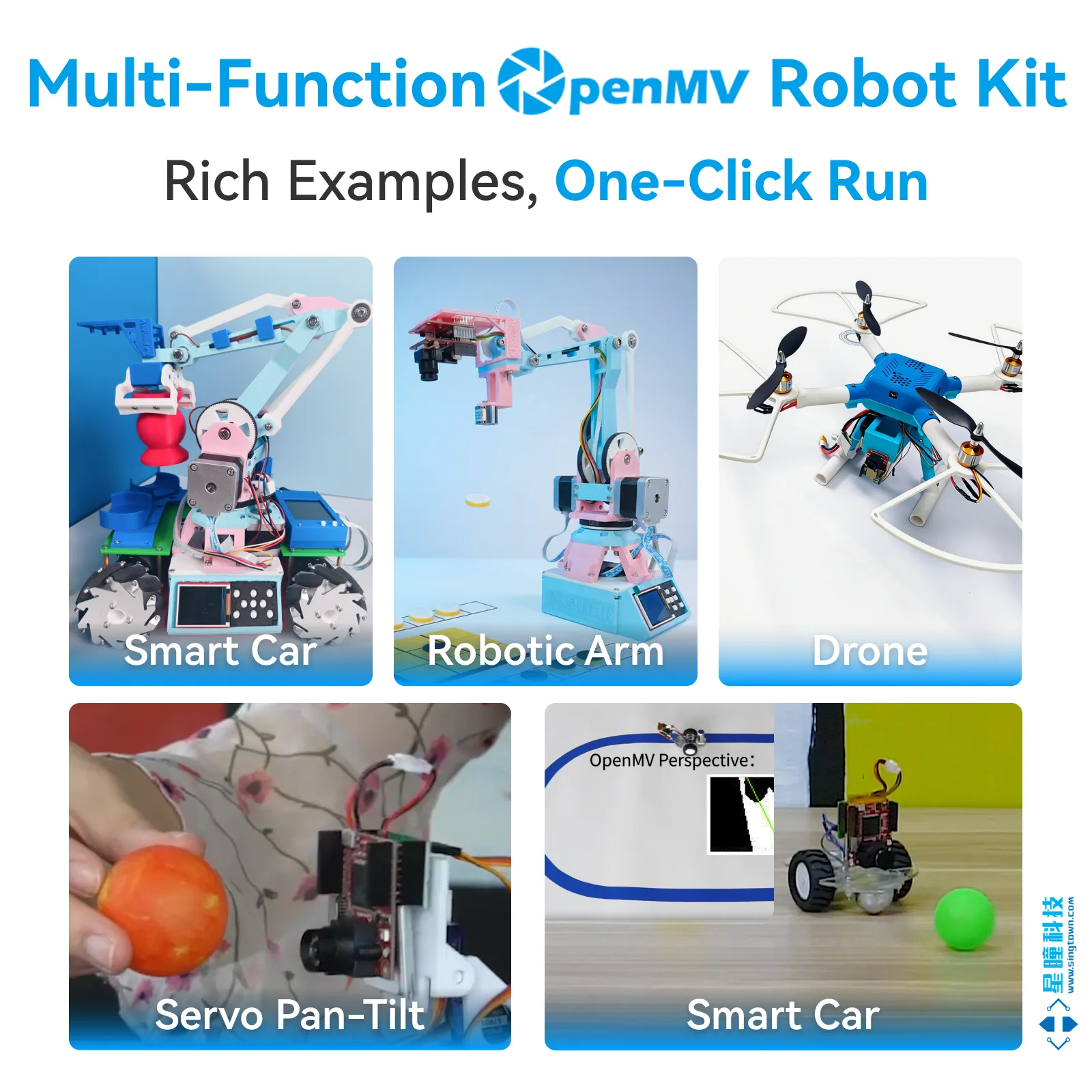
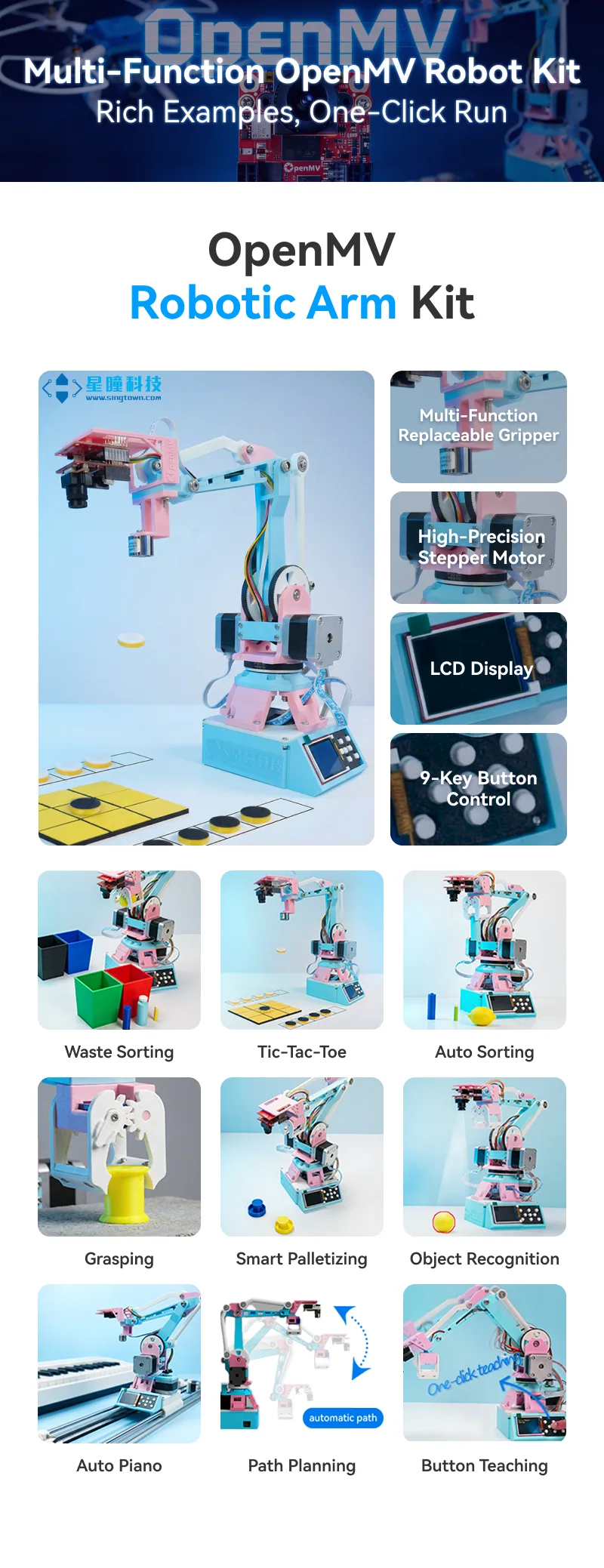
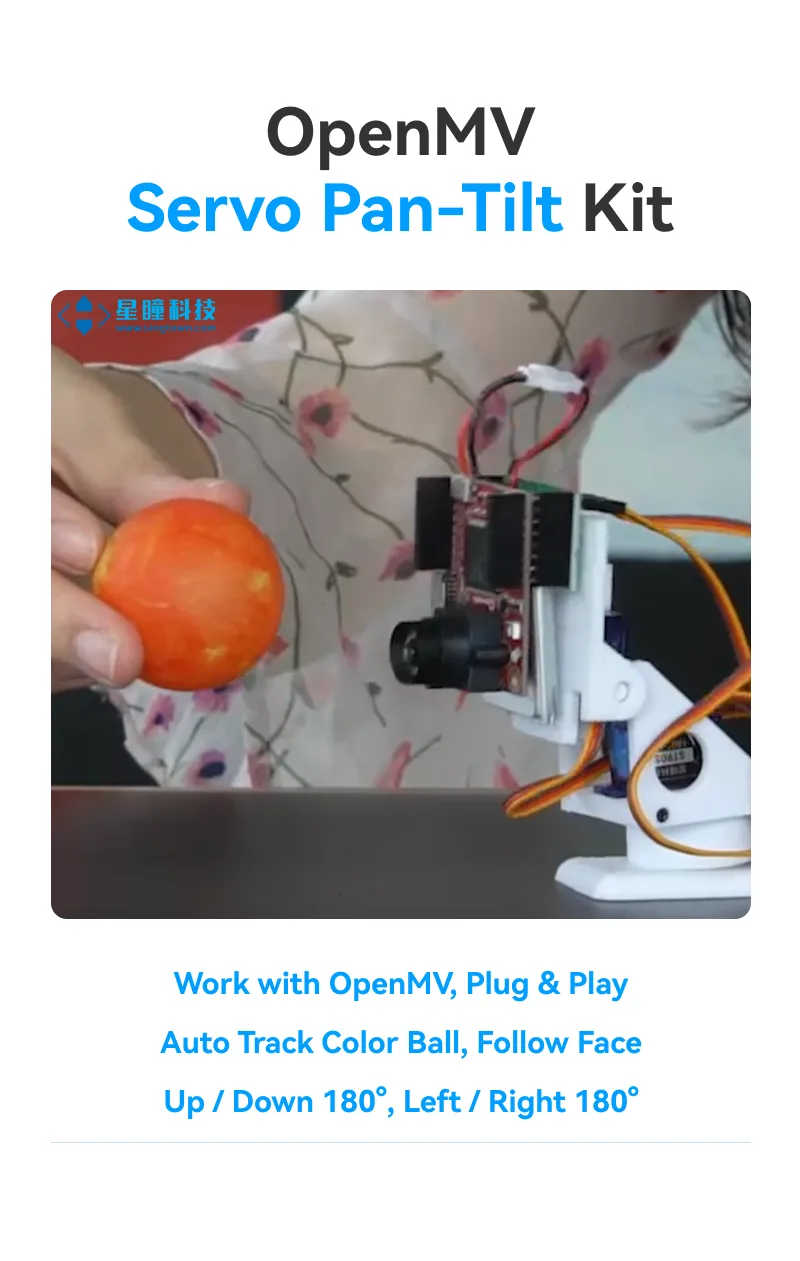
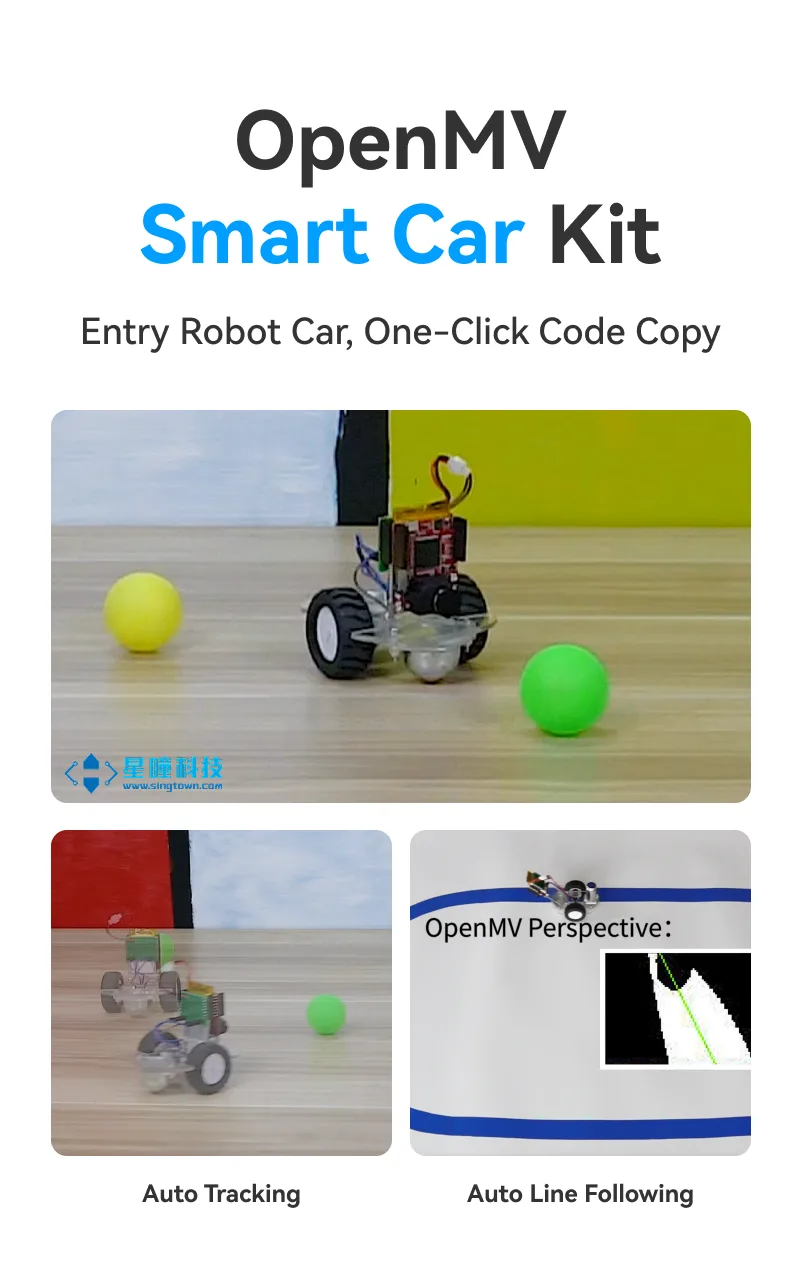
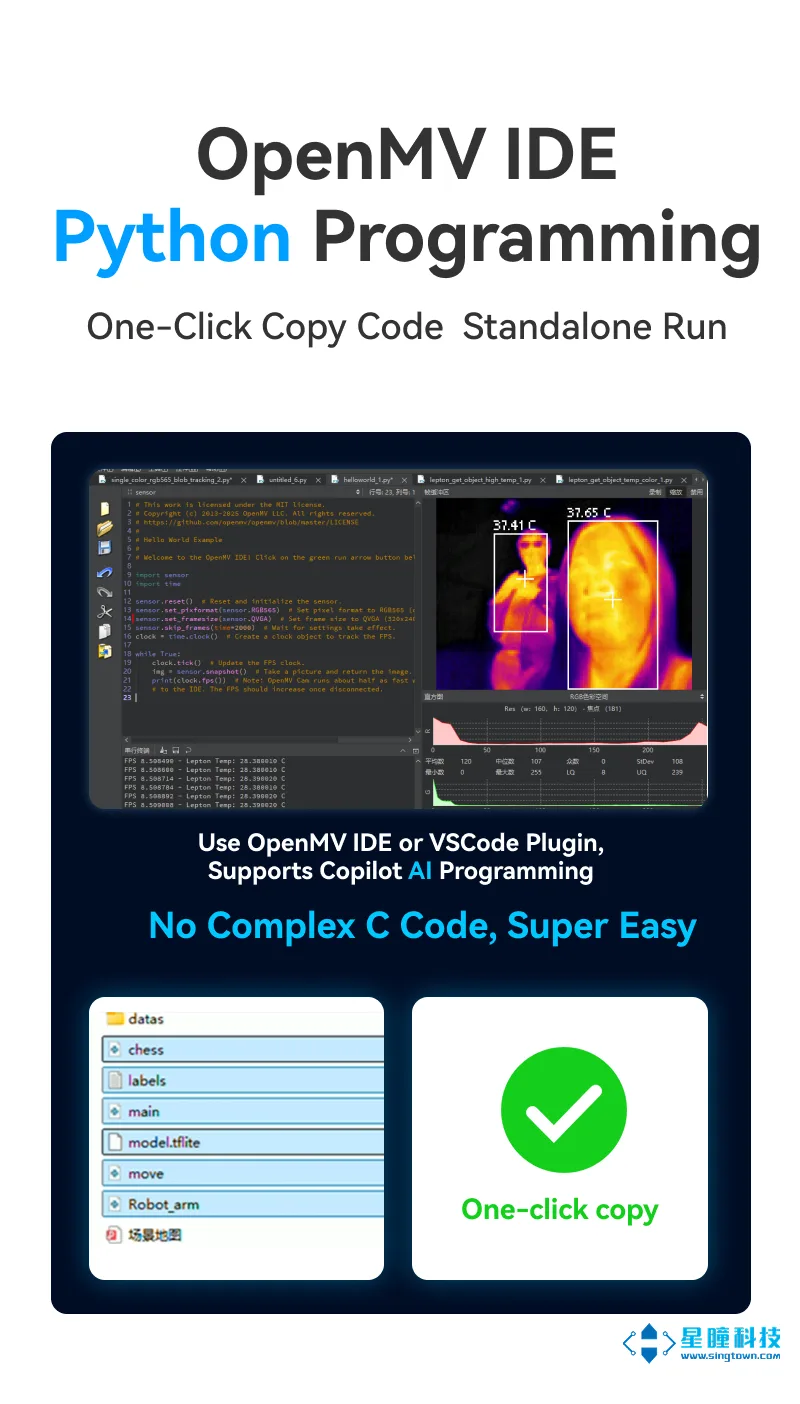
- Comes with official robot kits (robotic arm, drone, smart car, gimbal, etc.) – copy the code and run with one click!


















3D Model
Case
Mount
- Tripod 1/4-20 Styled Board Mount (.stl/.step)
- Tripod 1/4-20 Flat Board Mount (.stl/.step)
- GoPro Board Mount (.stl/.step)
Power and Battery Guides
Schematic
Datasheets
- Processor Datasheet: STM32N657L0 (.pdf)
- Reference Manual: STM32N657L0 (.pdf)
- Camera Brief: PAG7936 (.pdf)
- Camera Datasheet: PAG7936 (.pdf)
- Battery Charger Datasheet: BQ24075 (.pdf)
- Dual Ideal Diode Datasheet: LM66200 (.pdf)
- Ideal Diode Datasheet: LM66100 (.pdf)
- Backup Regulator Datasheet: TCR2LE33 (.pdf)
- 3.3V Regulator Datasheet: TPS62826 (.pdf)
- 1.8V Regulator Datasheet: TPS62824 (.pdf)
- Power Switch Datasheet: AP22800HB-7 (.pdf)
- VDDA Regulator Datasheet: MIC5365 (.pdf)
- PSRAM Datasheet: APS512XXN-OBR-BG (.pdf)
- FLASH Datasheet: MX25UM25645G (.pdf)
- SD Card Power Switch Datasheet: TPS22919 (.pdf)
- SD Card Voltage Switch Datasheet: SN74LVC1G3157 (.pdf)
- WiFi/BLE SoC Datasheet: LBEE5KL1YN (.pdf)
- WiFi/BLE Chip Datasheet: CYW43439 (.pdf)
- Ethernet PHY Datasheet: RTL8211FI-CG (.pdf)
- Ethernet TVS Datasheet: PUSB3BB4Z (.pdf)
- IMU Datasheet: LSM6DSM (.pdf)
- MIC Datasheet: MMICT3902 (.pdf)
- Opamp Datasheet: MCP6006T (.pdf)
- GPIO TVS Datasheet: PUSB3TB6 (.pdf)
- USB EMI Filter and TVS Datasheet: EMIF02-4CMX8 (.pdf)
- MIPI CSI EMI Filter and TVS Datasheet: EMI8143MUTAG (.pdf)
Certificates
The OpenMV N6 is a small, low power, microcontroller board which allows you to easily implement applications using machine vision in the real-world. You program the OpenMV N6 in high level Python scripts (courtesy of the MicroPython Operating System) instead of C/C++. This makes it easier to deal with the complex outputs of machine vision algorithms and working with high level data structures. But, you still have total control over your OpenMV N6 and its I/O pins in Python. You can easily trigger taking pictures and video on external events or execute machine vision algorithms to figure out how to control your I/O pins.
The OpenMV N6 features:
- The STM32N6 ARM Cortex-M55 vector accelerated processor capable of up to 8 operations per clock running at 800 MHz (6.4 gigaops) with 64MBs SDRAM + 4.2MB of SRAM and 32 MB of program/storage FLASH. The processor features a 1 GHz NPU offering 600 Gigaops of AI/ML compute for running models - allowing you to run YOLO object detection algorithms onboard at 30 FPS, an Image Signal Processor capable of handling up to 5MP RAW BAYER Camera Modules, GPU for graphics acceleration that can accelerate image scaling and 3D image rotation, and onboard H.264 Encode (up to 1080p) and JPEG Encode/Decode support hardware acceleration. All I/O pins output 3.3V and are 3.3V tolerant. The processor has the following I/O interfaces:
- A high speed USB-C (480Mbs) interface to your computer. Your OpenMV Cam will appear as a Virtual COM Port and a USB Flash Drive when plugged in.
- 1.5A current limited.
- With EMI Filtering and TVS protection.
- A μSD Card socket capable of 104MB/s reads/writes which allows your OpenMV Cam to take pictures and easily pull machine vision assets off of the μSD card.
- With EMI Filtering and TVS protection.
- Two SPI buses that can run up to 100Mb/s allowing you to easily stream image data off the system to either the LCD Shield or another microcontroller.
- And one I2S Bus for an audio CODEC.
- An I2C Bus (up to 1Mb/s), an I3C Bus (up to 10 Mb/s), two CAN Buses (up to 8Mb/s), and three Asynchronous Serial Buses (TX/RX, up to 12.5Mb/s) for interfacing with other microcontrollers and sensors.
- A 12-bit ADC (3.3V Tolerant).
- Three I/O pins for servo control.
- One I/O pin for frame sync/triggering (or servo control).
- Two I/O pins for low power wakeup.
- One shared with a button.
- Interrupts on all I/O pins (there are 18 I/O pins on the board).
- An onboard RTC that keeps running when the system is in low-power mode.
- With 8KB of Backup RAM.
- With a dedicated backup battery connection.
- A user controllable/dimmable RGB LED.
- A user button.
- Another RGB LED for Charging, USB Power, VIN Power indication.
- 64 MB of external 16-bit SDRAM clocked at 200 MHz DDR for 800 MB/s of bandwidth.
- 32 MB of program/storage octal flash clocked at 200 MHz in 8-bit DDR mode for 400 MB/s of bandwidth (read speed).
- An IMU (Accelerometer and Gyroscope) centered underneath the camera module.
- A Mic for recording audio and sound detection/processing.
- Onboard WiFi (a/b/g/n - 11/54/65 Mb/s) and Bluetooth (v5.1 - BR/EDR/BLE) module with a chip antenna.
- Option to use a U.FL antenna instead.
- Onboard 10/100/1000 Mb/s Ethernet
- Ethernet Jack with PoE support via an external shield.
- A removable camera module system, with support for MIPI CSI and 8-bit parallel, allowing the OpenMV N6 to interface with different sensors:
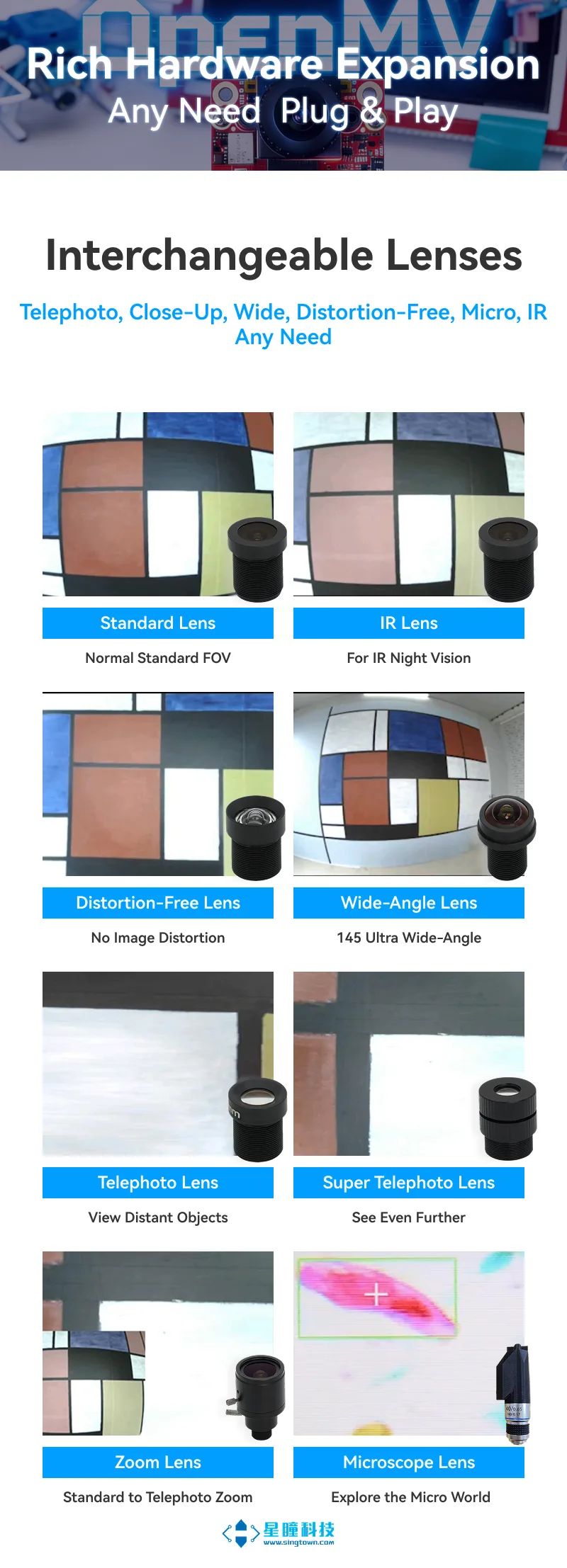
- The OpenMV N6 comes with a 120 FPS 1MP Color Global Shutter image sensor. Most simple algorithms will run about 120 FPS on VGA (640x480) resolutions and below. If you want to use more specialized lenses with your image sensor, you can easily buy and attach them yourself.
- Or you can use one of the many sensor modules in our sensor portfolio.
- A LiPo battery connector compatible with 3.7V LiPo batteries commonly sold online for hobbyist robotic applications with battery charging support via USB.
- 500 mA Fast Charge Current
- With TVS Protection.
- With ADC for reading the battery voltage.
- An ARM 10-pin JTAG Header Compatible with SEGGER J-Link Devices for debugging and programming.
- With EMI Filtering and TVS protection.
- BOOT1 switch for debugging.
- External 5V VIN with reverse supply protection.
- With TVS Protection.
Specs
PLEASE NOTE THAT THE I/O PINS OF THE N6 ARE NOT 5V TOLERANT! DO NOT CONNECT THE DEVICE DIRECTLY TO A 5V MCU LIKE THE ARDUINO MEGA.
You must power the N6 using VIN. The 3.3V pins are outputs only. VIN has a max voltage input of 5.7V. If you need to provide it higher than 5.7V, please use one of our new shields with 6V-36V switching regulator inputs.
Processor:
- ARM® 32-bit Cortex®-M55 CPU w/ Double Precision FPU
w/ ARM® MVE Helium™ technology (128-bit SIMD) - 800 MHz (1280 DMIPS)
- Core Mark Score: 3616 (compare w/ Raspberry Pi 3: 3800)
Camera Info:
- PAG7936 1MP Color Global Shutter Sensor
1280x800 @ 120 FPS
640x400 @ 240 FPS
320x200 @ 480 FPS - Optical Format: 1/4"
- Pixel Size: 3um x 3um
- CRA: 20°
- SNR: 36 dB
- Dynamic Range: 64 dB
Lens Info:
- Max Image Circle Diameter: 6.7mm
- Focal Length: 2.8mm
- Aperture: F2.0
- Optical/Mechanical TTL: 17.50
- Back Focal Length: 5.37mm
- Flange Focal Length: 4.53mm
- TV Distortion: <-24%
- Relative Illumination: >70%
- CRA: 14°
- Storage/Operating Temperature: -40°C to 85°C
- Format: 1/3"
- Mount: M12*0.5
- IR Cut Filter: 650nm
@420nm-600nm: Tavg > 90%
@650nm +/- 10nm: T=50% - Dust Level: IP4X
- Structure: 6G + 1BG
Actual FoV with PAG7936 image sensor:
- D78.0° H68.8° V46.4°
Electrical Info:
All pins are 3.3V tolerant with 3.3V output. All pins can sink or source up to 20mA. VIN may be between 4.7V and 5.7V. Do not draw more than 250mA from your OpenMV Cam's 3.3V rail.
Performance Specs:
- Power-on to inference result (attached to PC): ~2.5s
- Power-on to inference result (stand-alone): ~1.5s
- Wakeup from deepsleep to inference result (attached to PC): ~2.5s
- Wakeup from deepsleep to inference result (stand-alone): ~1.5s
- Bypass bootloader, power-on/wakeup to inference result (attached to PC): ~1.5s
- Bypass bootloader, power-on/wakeup to inference result (stand-alone): ~0.5s
- Bypass bootloader, power-on/wakeup to inference/image-save (attached to PC): ~4s
(PC slows down the system while reading the mass storage) - Bypass bootloader, power-on/wakeup to inference/image-save (stand-alone): ~0.75s
Power Consumption
Full Power: 150mA @ 5V (0.75W)
Deep Sleep: 1.6mA @ 3.7V (~6mW, via BAT connector)
Dimensions
- Length: 45 mm
- Width: 35 mm
- Height: 30 mm
Temperature Range
- Storage Temperature: -25 °C to +70 °C
- Operating Temperature: -25 °C to +70 °C
