
OpenMV
Домашня камера
Додатки
Магазин
AI
Канали збуту
Підтримка
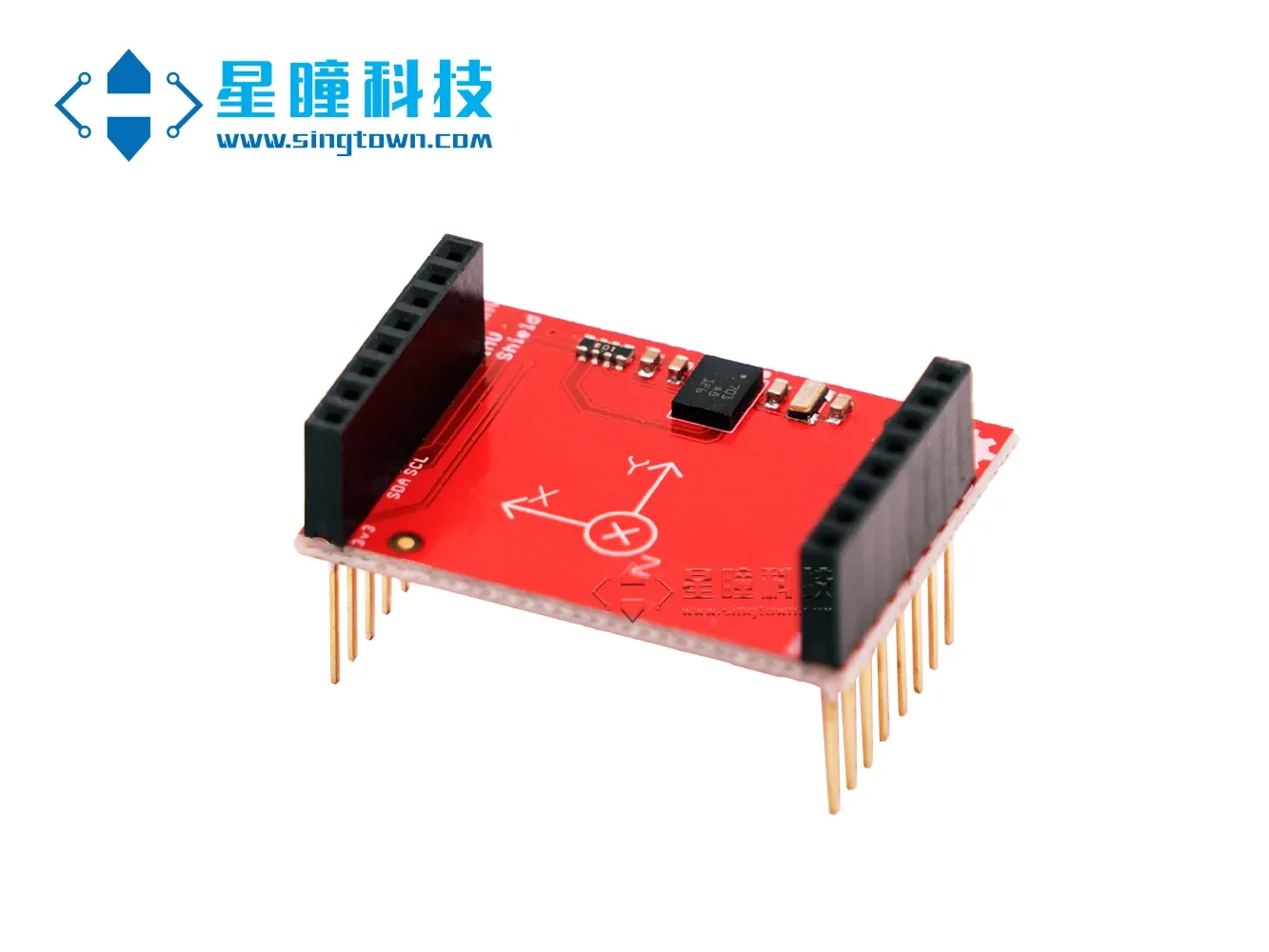
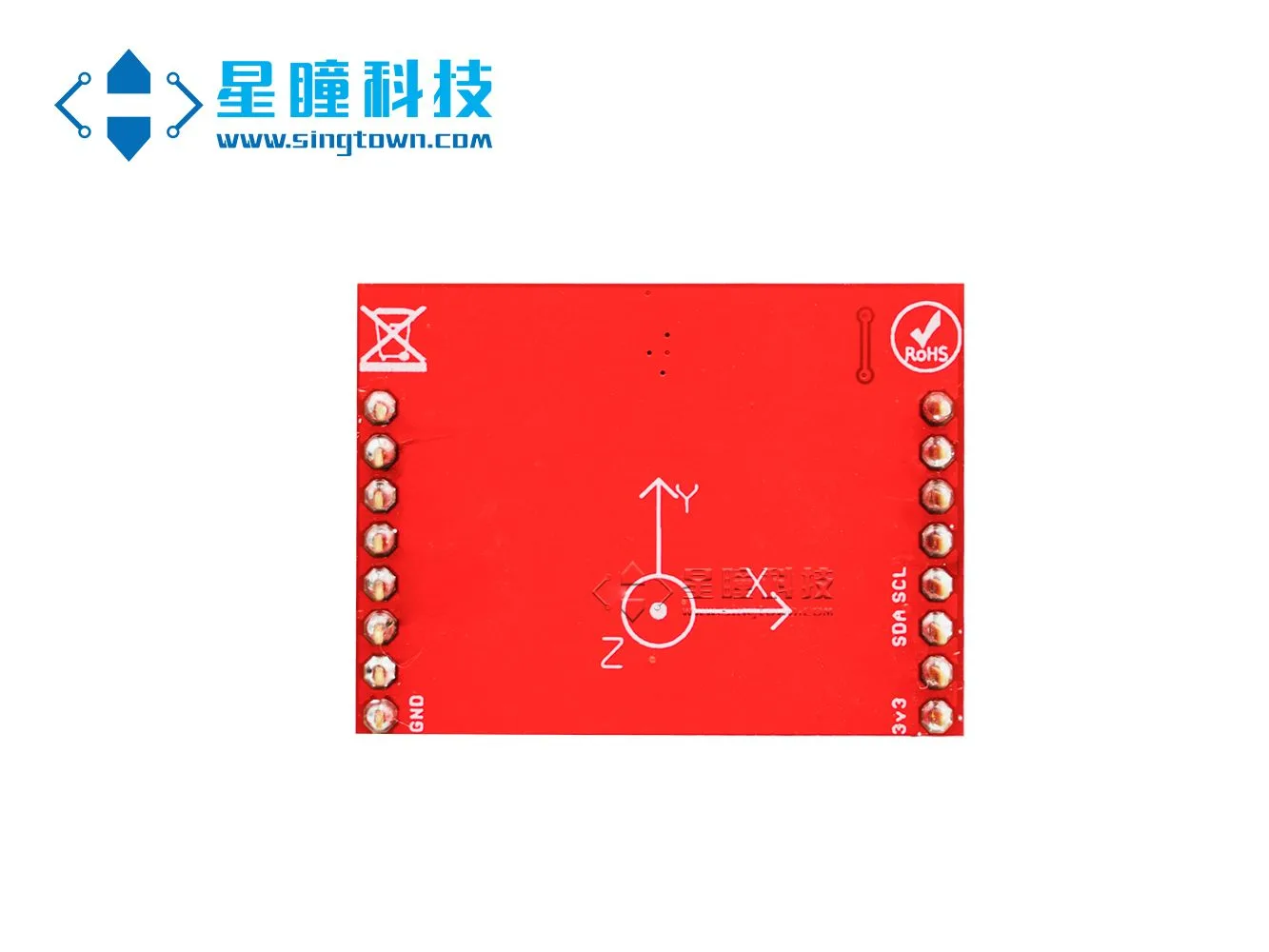
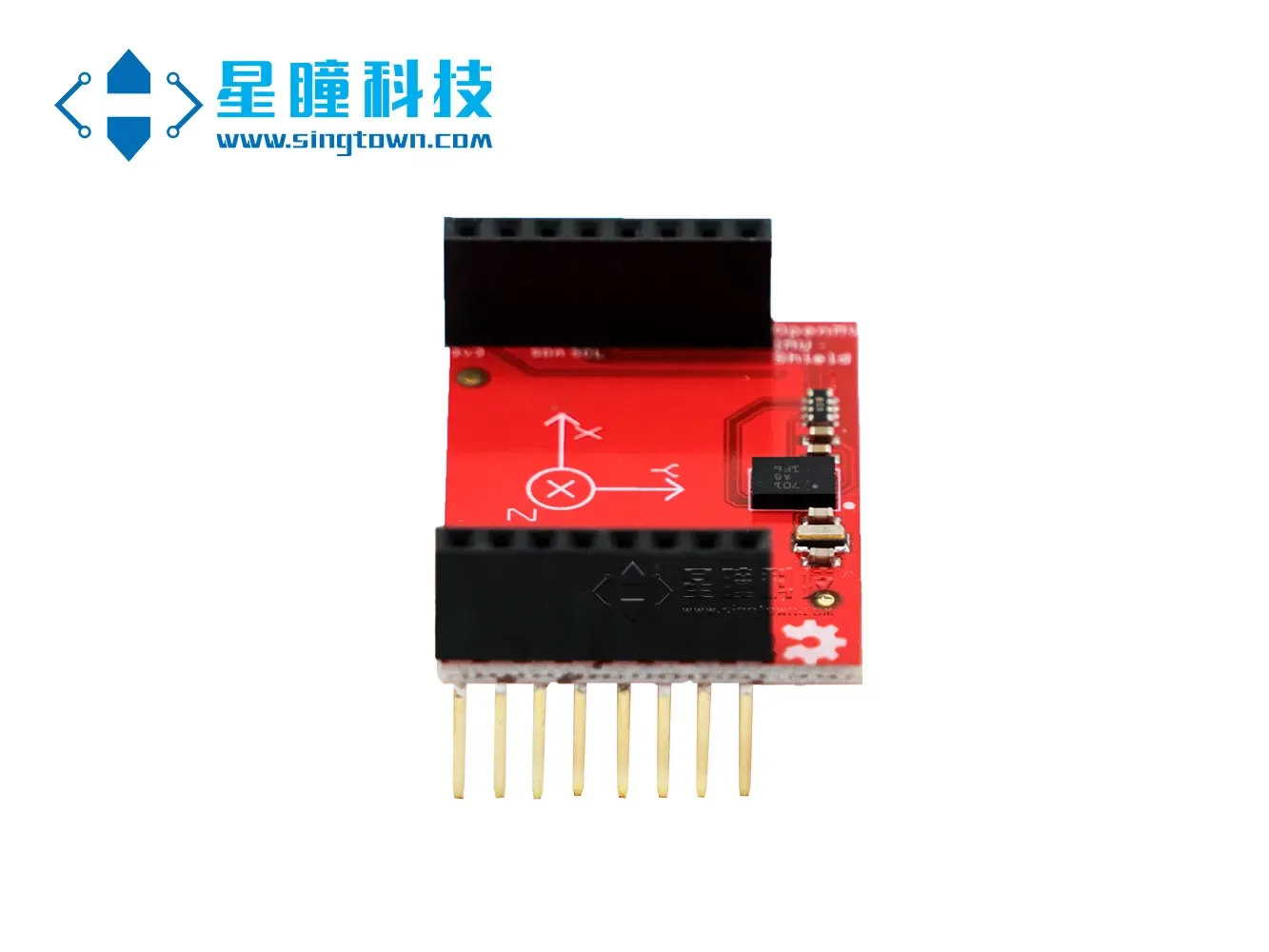
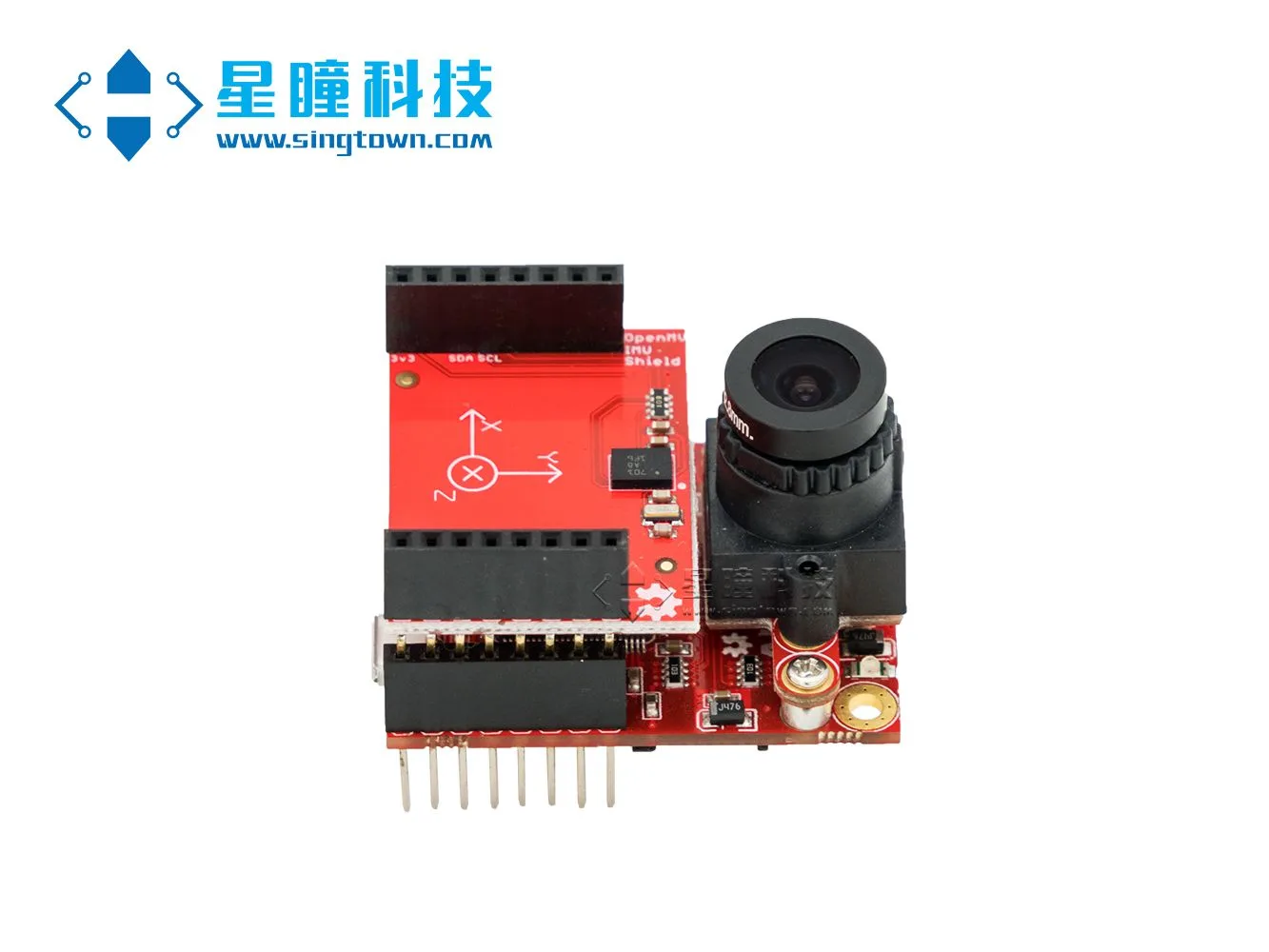
Плата розширення IMU OpenMV
产品信息
UAH1040
产品描述
The OpenMV IMU Shield not only captures acceleration, speed, and magnetic fields but also directly provides orientation, including quaternions and Euler angles.
The OpenMV IMU Shield not only captures acceleration, speed, and magnetic fields but also directly provides orientation, including quaternions and Euler angles.
The IMU Shield uses the BNO055, 9-DOF sensor and has a built-in attitude fusion algorithm that fuses accelerometer, magnetometer, and gyroscope data into a stable three-axis orientation.
OpenMV can capture the following sensor data:
- Absolute Orientation (Euler angles, 100Hz) - 3-axis orientation data 360°
- Absolute Orientation (Quaternions, 100Hz) - Quaternions represented as floating-point numbers for more precise operations.
- Angular Velocity (100Hz) - 3-axis rotational speed, unit is rad/s
- Acceleration (100Hz) - 3-axis acceleration (gravity + linear motion), unit is m/s^2
- Magnetic Field (20Hz) - 3-axis magnetic field, unit is micro Tesla (uT)
- Linear Acceleration (100Hz) - 3-axis linear acceleration (acceleration minus gravity), unit is m/s^2
- Gravity Acceleration (100Hz) - 3-axis gravity acceleration (minus all motion effects), unit is m/s^2
- Temperature (1Hz) - Ambient temperature, unit is Celsius
Tutorial


| Length | 36mm |
| Width | 27mm |
| Height | 20mm |
| Weight | 5.5g |
