概述
如果你想让你的电子作品动起来,舵机无疑是最简单的方式。最开始它是应用在航模的上的,由于经常用于控制舵盘方向,于是被爱好者们叫做“舵机”。舵机现在应用在各种地方,因为它控制起来非常简单。
[gif:舵机转动]
和直流电机不同,一个直流电机有两个引脚,给它通上电就会不停地转;如果你把电源方向反过来,它就会倒着转,而且电流越大,转的就越快。但是你不知道他的准确的位置,如果你想知道位置,那么就必须通过其他的传感器来测量它,比如电位器。
[gif:直流电机]
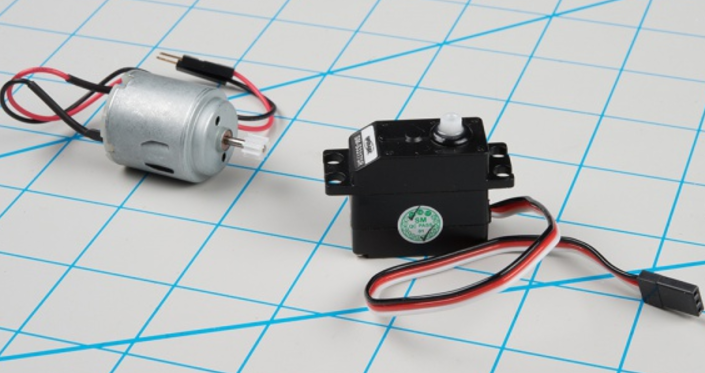
但是舵机,你可以直接控制舵机的位置,这非常方便。
伺服电机
通常来说,伺服电机(servo)的定义是使用反馈来控制位置的电机,但是不要弄混了。伺服电机在大型的工业机器上经常用到,但是本文讨论的是,hobby舵机,也叫RC舵机,它们广泛应用于航模的遥控车和遥控飞机。因为他的位置很容易控制,也经常用在机器人控制动作。
RC舵机都是标准化的,他们有相似的尺寸,形状,安装孔。
分类
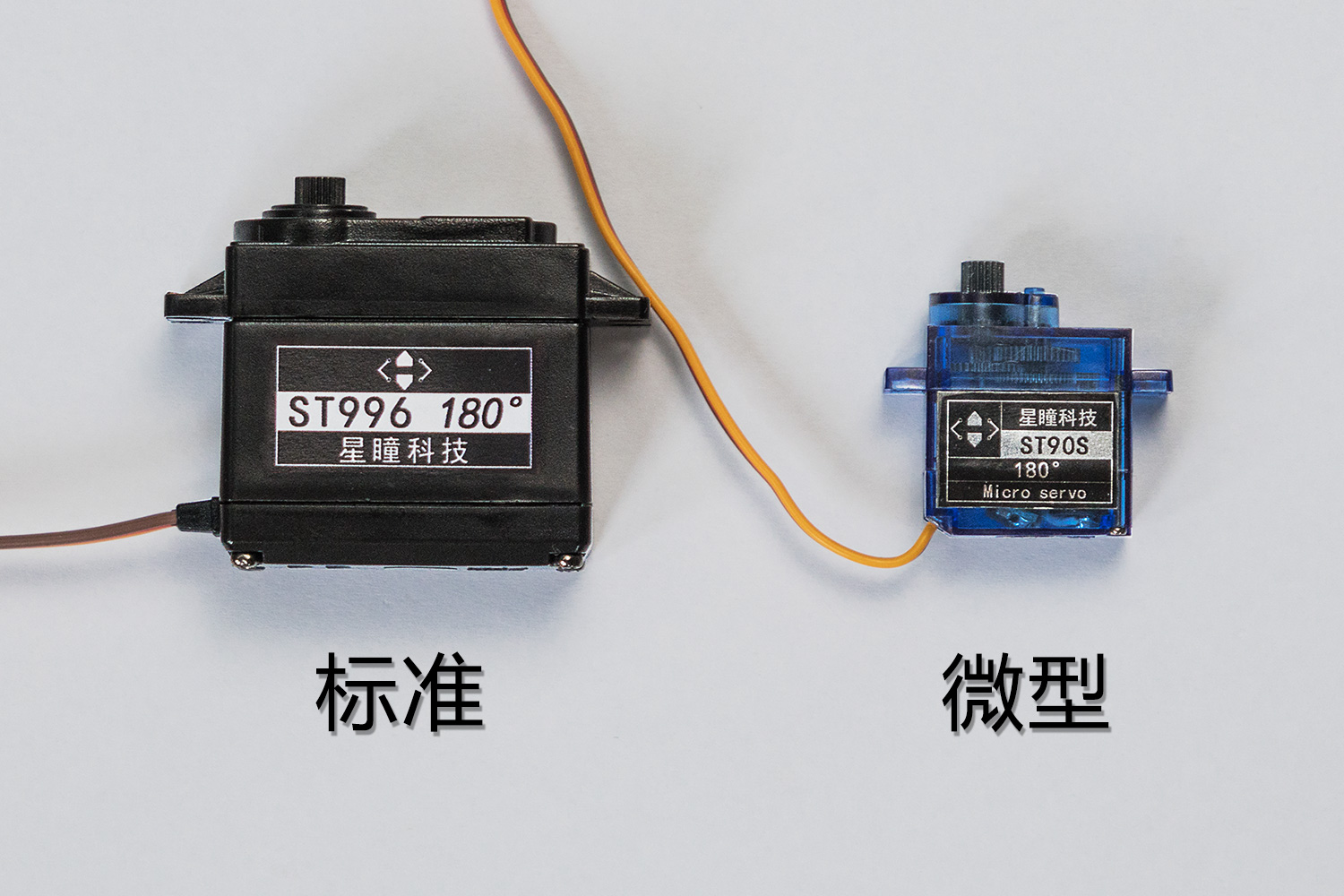
尺寸

尺寸有标准的,和微型的。
舵机一般有很多配件,比如舵盘,摇臂,一端安装到轴上,一端安装到你需要移动的装置上,如下图。

运动范围
1到2毫秒的脉冲范围是常见的,而不是一个强制的标准。有一些舵机响应其他长度的脉冲,比如270°的舵机。
注意:270°运动范围并不常见。一些舵机的结构限制在0~180°旋转。如果你强制驱动它们超出极限,它很容易坏,比如崩齿。
连续旋转
连续旋转舵机不会控制位置,而是将20毫秒的周期脉冲信号转换为旋转的速度和方向。剩下的就与普通舵机非常相似:相同的插头,相同的尺寸和外观。
这种舵机速度相对较低,大约60 RPM就是最大速度,如果你需要较高的转速,连续旋转舵机不是最佳选择,直流减速电机或无刷直流电机更合适,但它们兼容舵机的控制信号。
连线
舵机基本上都是标准的插头,而且具有相同的控制信号,所以舵机可以很容易替换。
舵机的插头一般都是3针,2.54mm间距。但是接线的颜色有时候不一样,但是,深色的一般是地线,红色的一般是电源线。

注意! 如果你不清楚,请检查文档,或者询问卖家,不要插反了!

供电
一般RC舵机的电源使用4.8V的电池。电池如果充满,电压会稍微高一点,电量耗尽后电压会下降。当电压下降后,舵机的力矩就会降低,所以可能动不了,可能导致遥控车,遥控飞机失控。
如果你不使用电池,使用5V直流电源也是一个很好的选择,最大供电电压应为5.5 V。
不管你怎么供电,值得注意的是,随着机械负载的增加,电机消耗的电流也会增加。一个空转的小舵机可能会消耗10毫安,但是加上负载可能会消耗1安培以上! 如果电源的电流不能满足任务要求,则电源的电压可能会下降,这可能会导致一些不可预测的情况,比如微控制器重启。
另外,如果你有多台舵机,或者电机有负载,最好使用大电流的电线。
如果有疑问时,用万用表测量一下消耗的电流,并检查舵机转动时电压是否下降。
控制信号
[gif:舵机转动]
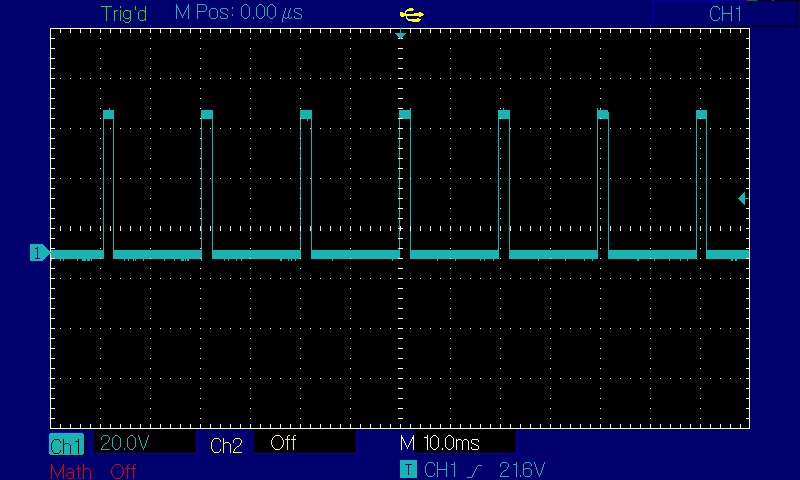
舵机插头的第三个引脚(信号线)传输控制信号,用于告诉电机的运动的位置。该控制信号是PWM脉冲。 脉冲的周期是20 毫秒(50 Hz),脉冲宽度在1毫秒和2毫秒之间变化。微控制器上提供的PWM控制器就可以很容易的控制舵机。
一般来说,当脉冲在1到2毫秒之间变化时,舵机在0~180°的范围内旋转 – 当脉冲为1.5毫秒时,它们应在运动范围的中心。(数据应该查看产品准确的舵机参数)